The all to common case of the Wobbling Hexapod (Tripod) : Is Your Foot hexa/Tripod Stable Enough to Walk or Run without Injury or Problem ?
Note the music we have chosen today. We tried to match the rate of the dancing tibialis anterior tendon to the tempo of the song, just for fun of course. Well, actually, for neurological reasons as well, as with a steady tempo or beat, your nervous system can learn better. Why do you think we teach kids songs to learn (or you can’t get the theme from the “Jetsons” out of your head).
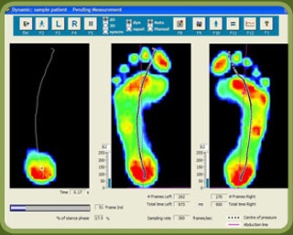
This is a great video. This client has an obvious problem stabilizing the foot tripod during single leg stance as seen here. There is also evidence of long term tripod problems by the degree of redness and size (although difficult to see on this plane of view) of the medial metatarsophalangeal (MTP) joint (the MPJ or big knuckle joint) just proximal to the big toe. This is the area of the METatarsal head, the medial aspect of the foot tripod.
As this client moves slowly from stance into a mild single leg squat knee bend the challenges to the foot’s stability, the tripod, become obvious. Stability is under duress. There is much frontal plane “Checking” or shifting and the tibial and body mass is rocking back and forth on a microscopic level as evidenced by the dancing tibialis tendon at the ankle level. The medial foot tripod is loading and unloading multiple times a second.
Is it any shock to you that this person has chronic foot problems which are exacerbated by running ? Every time this foot hits the ground the foot is trying to find stability. The medial tripod fails and the big knuckle joint (the 1st MPJ or big toe joint) is enlarging from inflammation, uncontrolled loading through the joint, and early cartilage wear and decay, not to mention the knee falling medially to the foot line as well. Hallux limitus (turf toe) is subclinical at this time, but it is on the menu for a later date. A dorsal crown of osteophytes (the turf toe ridge on the top of the foot) is developing steadily, soon to block out the range necessary for adequate toe off in this client. And that means a limitation in hip extension sometime down the road (and premature heel rise……. did you read Wednesday’s blog post on that topic ?).
*addendum:
Take the time to develop the skill. We ask our clients to work on standing with the toes up to find a clean tripod and do some shallow squats working on holding the tripod quietly. Be sure your glutes are in charge, spin of the limb is in part controlled at the core-hip level so that can a primary location to hunt as well. Eventually work into toes pressed flat but be sure the tripod is still valid, esp the medial tripod. Don’t be what Dr. Allen refers to as a “knuckle popper”. No toe curling/hammering either. Keep that glute on. Move the swing leg forward during a lunge, and then behind you during a squat (mimicking early and late midstance phases of gait/running). This will help your brain realize when it needs this stability and it will also act to press you off balance and will make the foot check and challenge. Do this until you feel the foot fatigue on the bottom. Then Stop. Repeat later. If the medial tripod collapses, the knee will drop inwards and excess pronation is inevitable. We modified this with our prescription of the “100 ups”…..combine the two !
Shawn and Ivo … . comfortably numb.
Once you have been to the Dark Side of the Moon (and hopefully you didn’t have any Brain Damage) you will know it well and know what to expect when you return again. Meaning, when you have seen these issues over and over again, hopefully in your daily work if not regularly here at The Gait Guys, you will quickly know what things to assess and look for in your athletes. And you might just turn into a Pink Floyd fan at the same time, or at least crave some Figgy Pudding (but you have to eat yer’ meat! How can you have any pudding if you don’t eat yer’ meat?).